Mesure.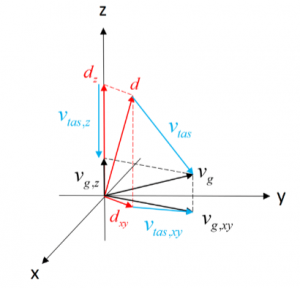
HAWK utilise la fusion de capteurs et un traitement numérique avancé du signal pour estimer le mouvement des masses d’air.
Triangle de vent tridimensionnel.
HAWK applique un algorithme de « filtre de Kalman étendu » (EKF) qui estime conjointement les trois dimensions du mouvement des masses d’air.
 Résultats instantanés.
Résultats instantanés.
L’EKF estime instantanément la direction et la vitesse du vent (horizontale et verticale). Plus besoin d’attendre !
Pas de compensation, pas de compromis.
Aucune compensation n’est nécessaire, car il n’utilise aucune loi de conservation de l’énergie. Des mesures vario nettes plus précises, indépendantes de la vitesse du planeur.
fini les faux thermiques dues aux rafales de vent!
Indication du vent
L’écran vue du vent vous permet de voir le vent instantané sur la flèche bleue et le vent moyen sur la flèche grise. |
 |
 |
Vario à deux aiguilles
Une aiguille rouge et une aiguille bleue simultanément. Le rouge indique la valeur des calculs du circuit de compensation classique tandis que le bleu clair indique la valeur de l’EKF. |
AHRS
Les résultats de l’estimation de l’attitude de l’EKF peuvent également être affichés sous forme d’horizon artificiel (Artificial HoRiZon). |
 |
DISPONIBILITÉ ET MATÉRIEL PRIS EN CHARGE.
L’option HAWK est actuellement disponible pour les systèmes de navigation GEN4 ou plus récents (LX80xx, LX90xx) équipés d’un variomètre V8 ou V80. La compatibilité HAWK dépend de la configuration spécifique de l’appareil et peut être vérifiée dans la boîte de dialogue À propos de l’appareil de navigation (version 8.03i ou plus récente de l’application). Pour les modèles S10 et S100, elle est disponible en tant qu’option logicielle.
HAWK a été développé par Heinrich Meyr et Peng Huang et est concédé sous licence à LXNAV.
Présentation de la compensation 3 axes
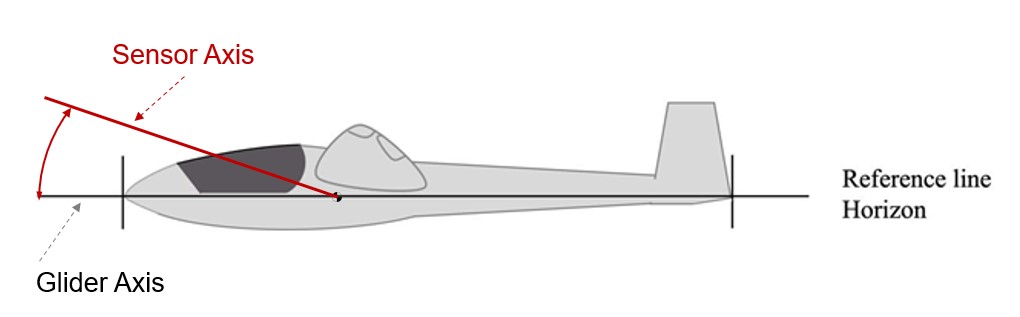
Lisez l’intégralité de la présentation sur la manière d’améliorer la précision en alignant le capteur et l’axe du planeur (en Anglais).
